



 Добавить новость
Добавить новость
Живые мышцы, выращенные в лабораторных условиях, помогают роботам сгибать палец
 Шрифт:
Шрифт:
danilov 12 Июня 2018 в 10:04:41
Это не первый случай, когда ученые смешивают роботов и живые мышцы. В 2016 году исследователи использовали мышцы сердца крысы, прикрепленные к золотому скелету, чтобы создать «биоробота», которым можно было бы управлять с помощью света. Вскоре после этого другая команда сделала робота из мускулов морской улитки.
В новом эксперименте исследователи из Токийского университета вырастили живые мышцы на поверхности роботизированного скелета. Они начинались с листов гидрогеля, содержащих миобласты или клетки-предшественники мышц. Они были прикреплены к опорным точкам на скелете и сформированы так, что мышцы будут расти, как волокна.
Так же были размещены электроды, для стимуляции мышц к сокращению, что позволило роботу двигаться, согнувшись в суставе, как палец. В предыдущих исследованиях искусственные мышцы со временем изнашивались и сжимались слишком долго, но исследователи из Токио смогли решить это, организовав их в естественной «оппозиции», где две мышцы работают вместе, чтобы достичь одной и той же цели по-разному. Например, когда кто-то сжимается и тянет конечность, другой расширяется и толкает его в одном направлении.
«Как только мы вырастили мускулы, мы успешно использовали их в качестве антагонистических пар в роботе, причем одни из них сокращаются, а другие расширяются, как и в теле», - говорит Сёдзи Такеучи, автор исследования. «Тот факт, что они оказывали противоборствующие силы друг другу, мешали им ухудшаться, как в предыдущих исследованиях».
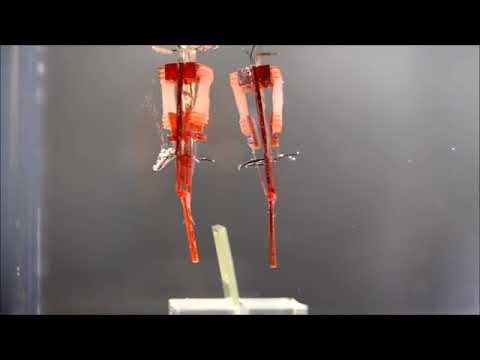
Чтобы испытать дизайн, исследователи сделали своего рода палец робота, который мог сгибаться до 90 градусов при электрическом включении. Один из этих роботов смог подобрать и переместить кольцо, в то время как два вместе могли взять квадратную рамку. Из-за антагонистического дизайна мышцы могут функционировать без ухудшения в течение недели.
«Наши результаты показывают, что, используя антагонистическое расположение мышц, эти роботы могут имитировать действия человеческого пальца», - говорит Юя Моримото, ведущий автор исследования. «Если мы сможем объединить больше этих мышц в единое устройство, мы сможем воспроизвести сложное мускульное взаимодействие, позволяющее функционировать руками, руками и другими частями тела».
Источник - robotos.in
 |
 |
|








